人形機器人進廠“實習” 從產線助手到具身智能的漫長征途

當人形機器人走進工廠車間,穿上工裝、拿起工具,開始它們的“實習”生涯,一幅未來制造業的圖景正從科幻走向現實。這不僅標志著機器人技術從專用機械臂向通用形態的躍遷,更引發了行業對“具身智能”——即擁有身體并能在物理世界中自主感知、學習和行動的智能——何時到來的深度思考。
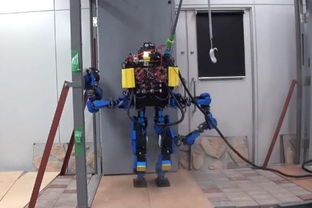
當前,人形機器人進廠“實習”主要集中在相對結構化、流程清晰的場景,如物料搬運、簡單裝配、質檢巡檢等。它們依靠高精度傳感器、預先編程的軌跡規劃和強大的運動控制系統,執行重復性高、勞動強度大的任務。特斯拉的Optimus、波士頓動力的Atlas、國內優必選的Walker等代表性機器人,已展示了行走、抓取、上下樓梯等基礎移動與操作能力,其背后是機械設計、驅動技術、運動控制與計算機視覺等多領域技術的融合突破。
從“能執行預設程序”到“擁有真正的智能”,橫亙著一道名為“具身智能”的鴻溝。具身智能的核心在于,智能并非孤立于計算芯片中,而是通過與物理環境的持續交互、感知與反饋來形成和演進。它要求機器人能夠理解模糊的指令(如“把那邊收拾一下”),適應動態變化的環境(如突然出現的障礙物),并從經驗中學習新的技能(如通過試錯學會打開一種從未見過的門把手)。
實現這一目標面臨多重挑戰:首先是感知與理解的復雜性。車間環境雖相對規整,但仍有光線變化、物體遮擋、未知物體出現等不確定性。機器人需要更強大的多模態感知(視覺、觸覺、力覺等融合)和場景理解能力,以建立對環境的準確“心理模型”。
其次是決策與學習的困難。當前的工業機器人大多依賴精確的離線編程或示教。而具身智能需要機器人能進行在線規劃、因果推理,并能從少量演示或自主探索中高效學習。這涉及強化學習、模仿學習、大模型等AI技術與機器人控制技術的深度融合。將大語言模型(LLM)或視覺語言模型(VLM)接入機器人,使其能理解自然語言指令并分解任務,是一條備受關注的技術路徑,但如何將抽象的“知識”轉化為穩定、安全的物理動作,仍是巨大難題。
再者是硬件與成本的制約。具身智能需要高度靈巧、耐用的仿生肢體(如多指靈巧手),強大且節能的驅動器,以及遍布全身的感知皮膚。這些硬件目前成本高昂,可靠性和續航能力也有待提升。
最后是安全與倫理的考量。擁有更高自主性的機器人如何在復雜環境中確保人機協作的安全?其決策過程是否透明、可解釋?這些都是產業化前必須解答的問題。
人形機器人走向真正的具身智能將是一個漸進式的過程,而非一蹴而就的突破。短期內,我們將在更多工廠看到它們作為“超級工具”,在特定工位上發揮價值,其智能將體現在更柔性的任務切換和更易用的編程方式上。中期內,隨著AI模型、傳感器和算力的進步,機器人將具備在非結構化環境中執行多步驟復合任務的能力,例如獨立完成整個小部件的裝配流程。長遠來看,當機器人的感知、認知、決策與行動形成一個高效、自主的閉環,并能通過與世界和人類的交互不斷進化時,或許才是具身智能真正到來的時刻。
這條道路需要機器人學、人工智能、材料科學、認知科學等多學科的持續深耕與交叉創新。人形機器人的“工廠實習”,正是這場漫長征程中堅實而令人期待的第一步。它不僅是技術的試煉場,更是智能形態從虛擬走向實體、從孤立走向嵌入的關鍵躍遷。那一天或許不會突然降臨,但每一步前進,都讓我們離那個機器真正“理解”并自如行動于我們世界的未來更近一點。
如若轉載,請注明出處:http://www.echocntest.cn/product/56.html
更新時間:2026-01-07 23:06:07